在癌症的传统化疗药物治疗中,患者长期面临疗效不佳以及治疗副作用的困扰。这两大问题主要是由于现有药物治疗缺乏足够的靶向性所引起的:其一,药物分子难以实现对肿瘤部位的精准靶向,削弱了治疗效果;其二,药物在体内循环过程中易作用于健康组织,进而引发毒副反应。此外,肿瘤药物递送还面临着递送效率低、血流环境以及生理屏障等多重技术瓶颈,进一步降低了疗效。因此,开发具备高精准性、高效性和低毒性的新型肿瘤递送治疗技术尤为重要。
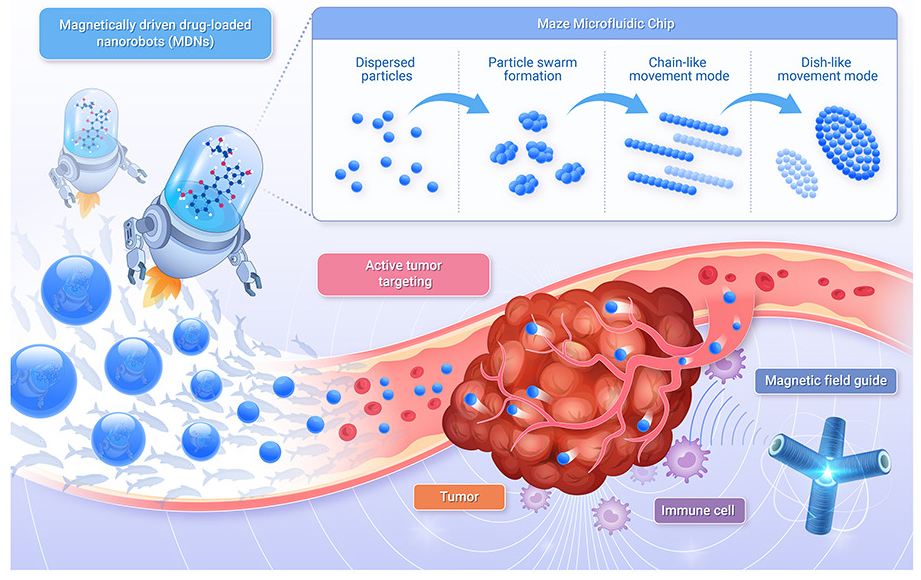
针对上述问题,中国科学院高能物理研究所纳米生物效应与安全性实验室的邢更妹和李娟研究团队,联合北京航空航天大学冯林团队研发出磁驱动仿生载药纳米机器人(Magnetically Driven Nanorobots,MDNs)用于解决肿瘤靶向药物递送所面临的诸多挑战。
在纳米机器人驱动技术领域,磁场操控技术凭借其远程可控、非侵入性、无组织损伤、可编程性、精准主动靶向、多功能集成以及无需外部燃料等显著优势脱颖而出,尤其适用于体内药物递送过程的实时可视化监测与成像分析。作为磁驱动纳米机器人的核心构筑单元,氧化铁纳米粒子因兼具独特的磁响应特性、良好的生物安全性及药物分子共价偶联的功能化潜力,成为理想的材料选择。然而,实现高效磁场操控的关键在于对氧化铁纳米粒子表面性质、微观结构及磁学性能的精确调控。
为突破肿瘤靶向治疗瓶颈,研究团队构建了一套三维磁控纳米机器人系统,用于化疗药物的精准递送。通过创新合成策略,成功制备了基于氧化铁纳米颗粒的水溶性载药纳米机器人,并采用pH响应性共价键合实现了阿霉素的稳定负载。团队自主设计搭建的三维磁操控平台,运用四磁源协同控制机制,其可编程磁场能够在三维空间内灵活调节强度与频率参数,赋予纳米机器人多样化的运动模式。该平台集成的视觉识别双闭环控制系统,可将纳米机器人的定位误差控制在微米级精度范围
在复杂流体环境中,该纳米机器人系统展现出卓越的环境适应性。通过模拟野生鲱鱼群的集群运动行为,可实现群体分散、队列重组、漩涡形成及定向迁移等动态运动模式,有效突破肿瘤组织的生理屏障。基于物理靶向与精确定位,纳米机器人能够实现肿瘤部位的特异性富集,相较于传统递送方式,药物递送效率实现数量级提升
除此之外,该纳米机器人系统集成了荧光成像与磁共振造影增强功能,可实时监测药物递送进程并量化评估肿瘤治疗效果,为临床治疗方案的动态优化提供数据支持。进一步研究表明,该纳米机器人不仅能够直接杀伤肿瘤细胞,还可通过调节肿瘤微环境,激活免疫细胞活性并促进其浸润,显著增强机体抗肿瘤免疫应答。
相关研究成果以Magnetically driven bionic nanorobots enhance chemotherapeutic efficacy and the tumor immune response via precise targeting为题,作为《创新》第6卷第2期的封面文章发表(The Innovation, 2025, DOI:10.1016/j.xinn.2024.100777)。
中国科学院高能物理研究所的博士研究生王志杰为第一作者,通讯作者为中国科学院高能物理研究所李娟副研究员、邢更妹研究员和北京航空航天大学冯林教授。本研究由国家重点研发计划、北京市科技计划计划项目和北京市杰出青年基金支持,并依托中科院北京同步辐射设施(BSRF)下开展。
原文链接:https://www.sciencedirect.com/science/article/pii/S2666675824002157


